扫码关注
扫码关注

















- 全部
- 默认排序
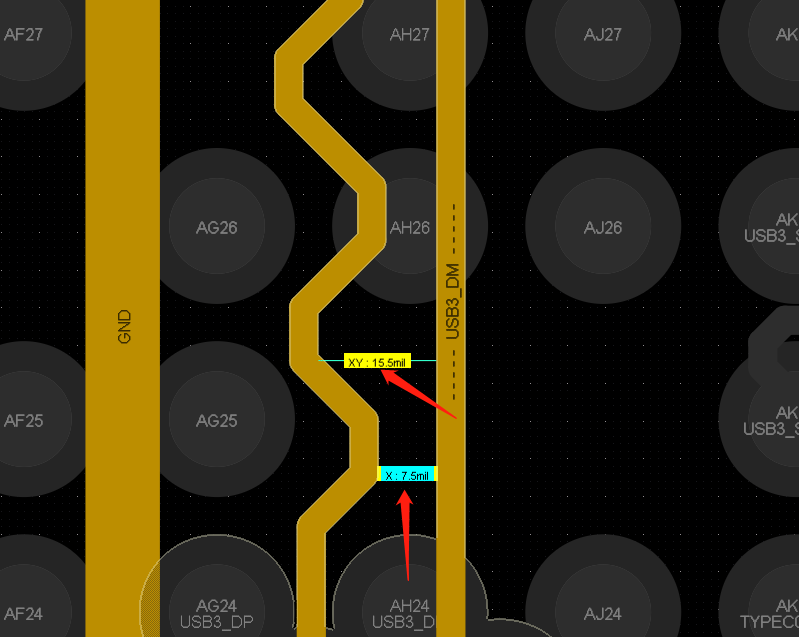
注意差分凸起高度不能超过线距的两倍2.差分走线需要优化一下3.时钟信号尽量包地处理4.电容尽量靠近管脚均匀摆放5.差分出线要尽量耦合,后期自己优化一下6.存在多处开路后期自己在顶底层铺上电源和地铜皮7.变压器需要挖空所有层处理

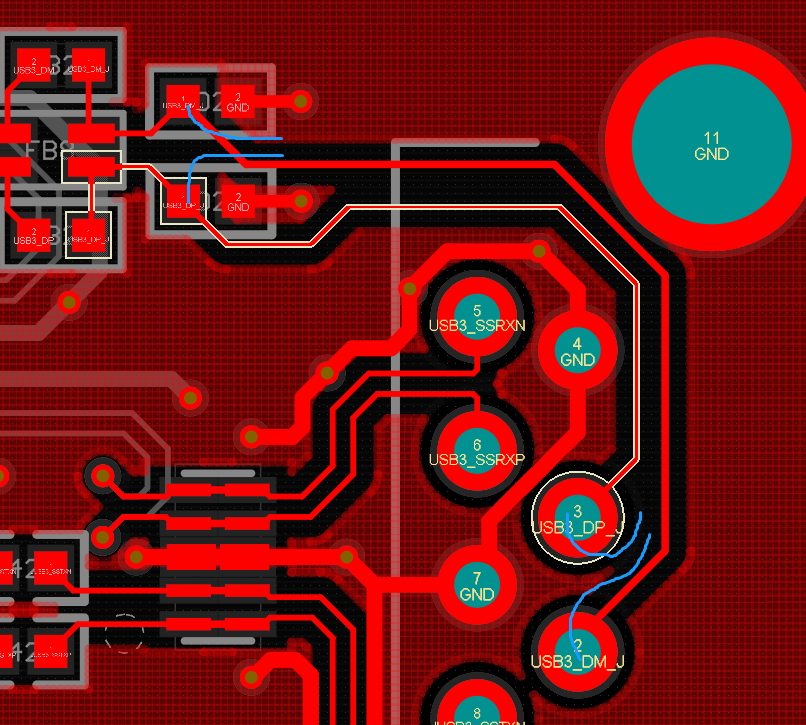
注意差分出线要尽量耦合,走一起2.注意差分走线需要按照阻抗线宽线距走线,否则容易产生阻抗突变3.打孔要打在ESD器件前面4.走线一层连通不用打孔差分需要进行对内等长,误差5mil差分对内等长凸起高度不能超过线距的两倍注意器件摆放不要干涉一脚
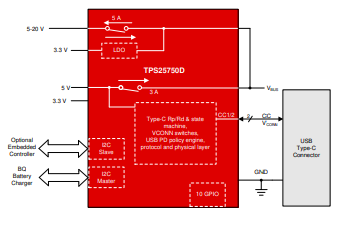
一、器件介绍TPS25750 是一款高度集成的独立式 USB Type-C 和电力输送 (PD) 控制器,针对支持 USB-C PD 电源的应用进行了优化。TPS25750 集成了完全管理的电源路径与强大的保护功能,可提供完整的 USB-C
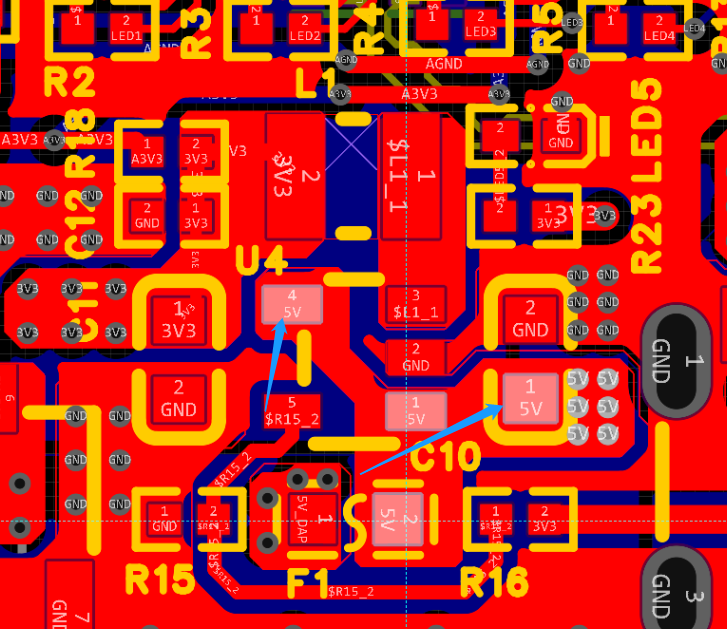
1.电源输入的滤波电容应该靠近输入管脚(4脚)放置2.反馈一般以一根10mil的线连接到输出滤波电容之后3.差分线处理不当,锯齿状等长,凸起高度不得超过线距的两倍4.焊盘出线不规范,焊盘中心出线至外部才能拐线处理,避免生产出现虚焊;pcb上
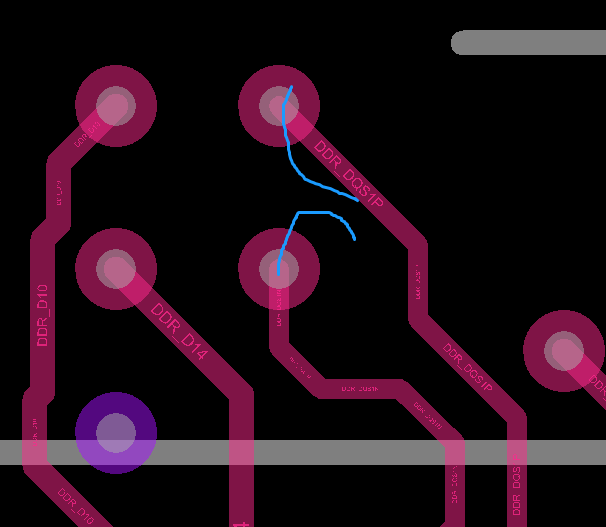
差分对内等长凸起高度不能超过线距的两倍2.焊盘出线可以在优化一下3.差分走线需要按照阻抗线宽线距进行走线4.pcb上不要存在stub线5.注意差分对内等长误差5mil6.存在多处开路,后期自己检查一下drc7.过孔到焊盘间距太近,间距最少6
轻型协作机器人是一种工业机器人,具有平面大小的触摸屏用户界面,用户可以通过指示屏幕上的动作来控制机械臂,与传统的机器人相比,协作机器人的重量更轻.高度灵活.便于移动,并能重新编程解决新任务,可帮助企业调整实现更先进的小批量加工生产,从而应对

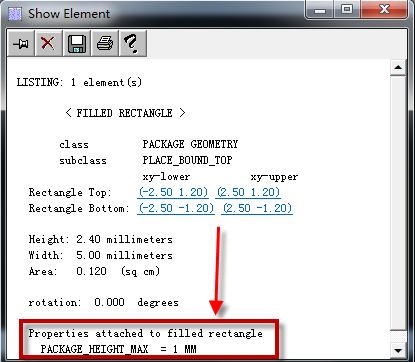
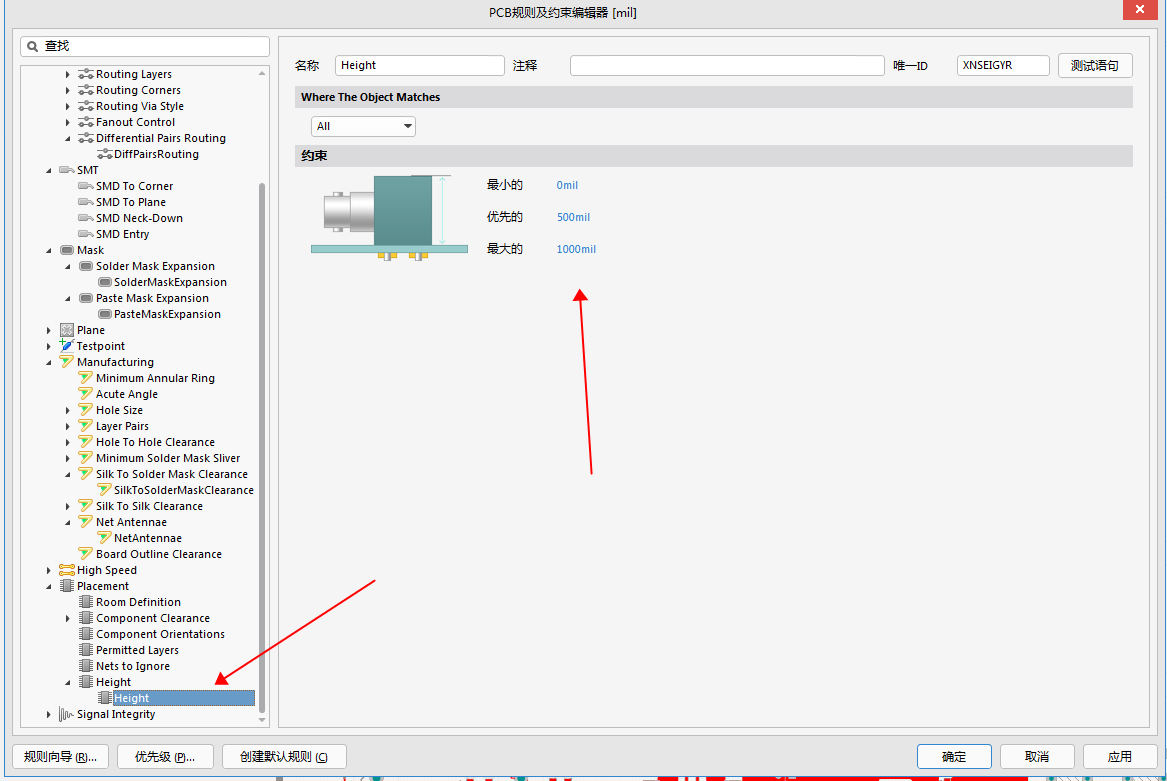
因为考虑到PCB布局存在限高要求,这种情况需对高度等进行例行检查,元件高度检查需要元件封装设置好高度信息,设置好高度检查规则及适配范围(全局还是局部),并勾选高度检查。
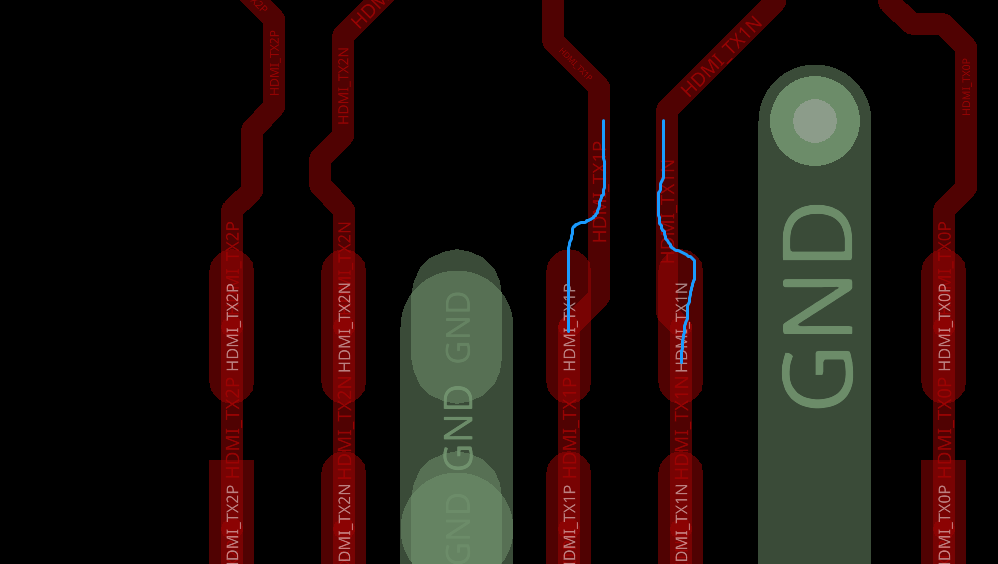
注意焊盘出线规范2.差分对内等长凸起高度不能超过线距的两倍,注意上面要满足3W3.差分包地需要再地线上打上地过孔,间距50-100mil4.差分对内等长存在误差报错5.注意地网络需要就近打孔以上评审报告来源于凡亿教育90天高速PCB特训班作
差分走线要耦合出线2.差分对内等长凸起高度不能超过线距的两倍3.器件摆放干涉,后期自己调整一下放底层4.器件摆放太近5.滤波电容尽量保证一个管脚一个,原理图不够可以自己添加6.过孔不要上焊盘7.差分出线要尽量耦合以上评审报告来源于凡亿教育9
答:在做PCB设计时,有时结构上会对局部的器件布局有高度要求,不能将超过高度限制的器件放到限高区,否则会导致PCB装配问题。这个高度信息我们可以在做PCB封装时进行设置,设置好了就可以在设计时查看高度信息,辅助我们进行PCB设计。第一步,打开一个PCB封装,将Package Geometry-Place_Bound_top层显示出来,如图4-70所示, 图4-70 显示元器件占地面积示意图第二步,点击Setup-Areas-Package Height选项,如图4-71所示