扫码关注
扫码关注

















- 全部
- 默认排序
扫地机器人的机身为无线机器,以圆盘型为主。使用充电电池运作,操作方式以遥控器、或是机器上的操作面板。一般能设定时间预约打扫,自行充电。扫地机器人的前方有设置感应器,可侦测障碍物,如碰到墙壁或其他障碍物,会自行转弯,并依每间不同厂商设定,而走

发布:2022年4月13日-版本22.4.2(构建48)原理图捕获的改进显示备用组件的参数当浏览变异原理图文档的编译选项卡上,替代部分现在显示在属性另一个部分是定义一个组件的示意图。 当一个编译选项卡被选中时,属性面板将显示当前变体的组件的

集成库创建完成后,如何对创建好的集成库进行调用呢?这时就涉及集成库的安装使用了。第一步:如图2-36所示,单击右侧上角面板栏中的“”,如图1所示。图1第二步:对于“Data Management-Installed Libraries”选项

答:过孔也称金属化孔。在双面板和多层板中,为连通各层之间的印制导线,在各层需要连通的导线的交汇处钻上一个公共孔,公共孔一般被称为过孔。过孔制作可按以下步骤(以10/22大小过孔为例)。
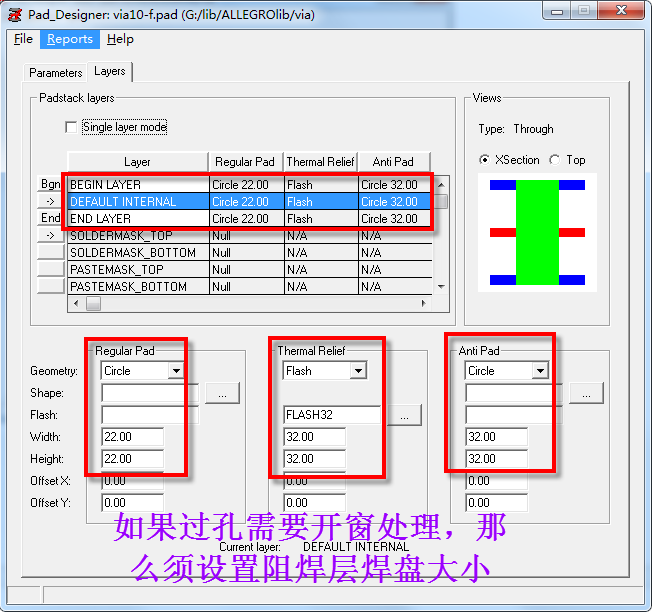
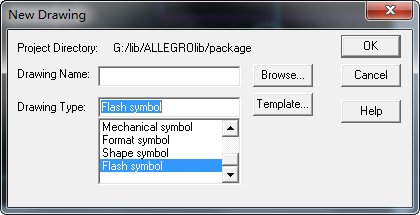
过孔也称金属化孔。在双面板和多层板中,为连通各层之间的印制导线,在各层需要连通的导线的交汇处钻上一个公共孔,公共孔一般被称为过孔。过孔制作可按以下步骤(以10/22大小过孔为例)。第一步,创建过孔所需要的Flash。打开Allegro软件,点击File-New,新建一个Flash,按图示参数创建好,保存名为Flash32,如图4-108所示, 图4-108 创建flash示意图第二步,打开Pad_Designer,按以下参数新建好过孔,如图4-109所示,设置钻孔参数,如图
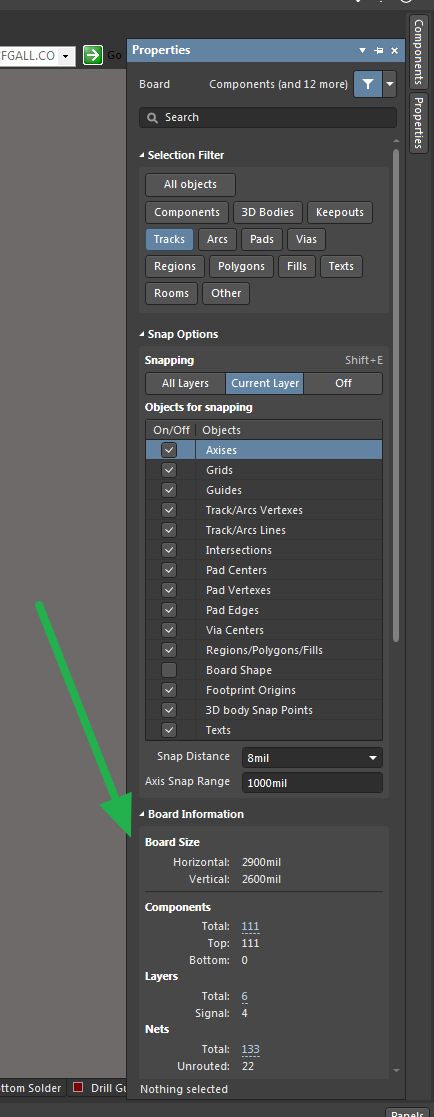
Ad19由于做了更新的改动,所以我们对应的RB就不能进行管脚的查看,首先我们点击我的PCB界面,然后我们点击我们的PCB的空白处,我们点击一下,然后我们对应在我们的panel 面板下面调用出我们的proprieties这个界面,这个和低版本不一样之处在于,高版本将prorieties这个界面替代了我们的PCB Inspertor.
第一步,给大家我们讲一下单个元器件的旋转方法,第一种方法:是Rotate命令,这个命令是配合移动命令,执行移动命令,在Find面板中选择元器件,抓取元器件,元器件会吸附在鼠标上,如图6-10所示; 图6-10 移动元器件示意图第二步,元器件吸附在鼠标上以后,点击鼠标右键,执行Rotate命令,进行元器件的旋转,如图6-11所示,旋转的角度可以在Options面板中进行设置,比如设置为90度,则器件则按照90度进行旋转,旋转到需要的角度,点击鼠标左键完成旋转; 图6

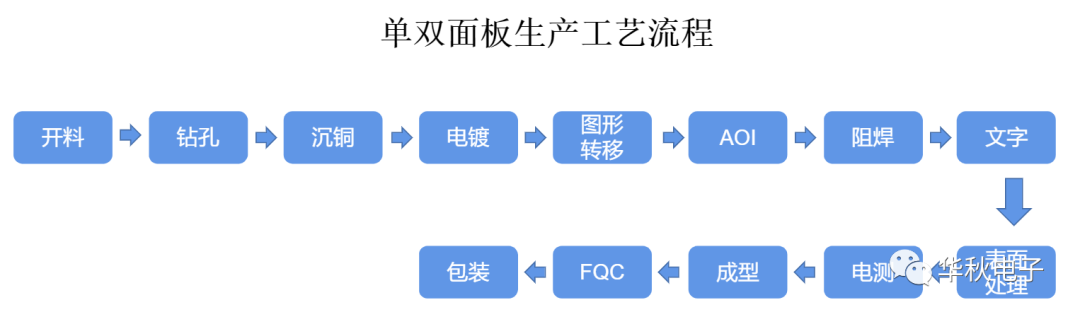
按照PCB板的层数不同,可分为单面板、双面板和多层板,虽然都属于PCB板,但制作流程却有很大的明显,身为电子工程师的你,知道它们是如何制作吗?今天凡小亿开课谈谈它们的制作工艺,希望对小伙伴们有所帮助。需要注意的是,相比多层板,单面板和双面板

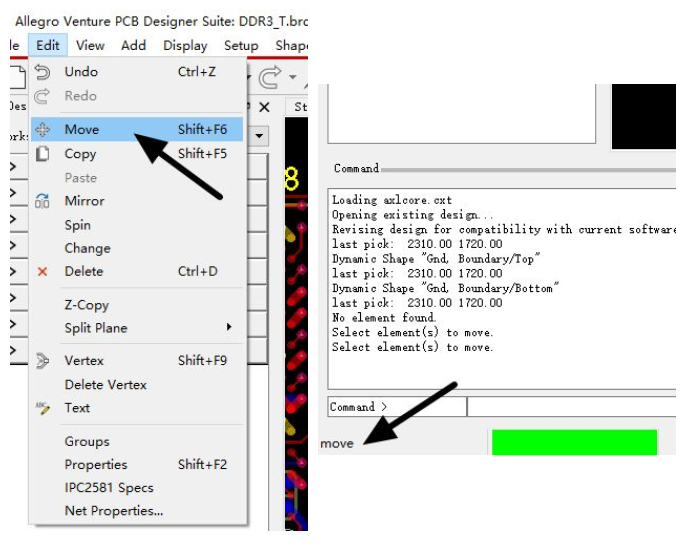
在布局的时候,常常需要对一些元素去进行移动位置以方便进行设计。1、执行菜单命令Edit-Move,此时PCB界面的左下角会显示Move,就表示正在执行移动命令,如图1所示。图1 移动命令2、在PCB界面右边的Find面板中所选择需要进行移动
衔接上文,继续为朋友们分享普通单双面板的生产工艺流程。如图,第二道主流程为钻孔。钻孔的目的为:对PCB进行钻孔,便于后续识别、定位、插件及导通。目前,行业内主流的PCB钻孔方式为:机械钻孔、激光钻孔。其中,机械钻孔的子流程主要有6个。【1】