扫码关注
扫码关注

















- 全部
- 默认排序
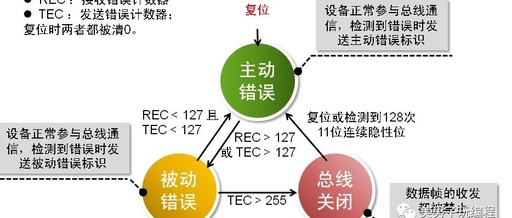
CAN通信是通过以下5种类型的帧进行的:数据帧 遥控帧 错误帧 过载帧 帧间隔另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的标识符(Identifier: 以下简称 ID), 扩展格式有 29 个位的 ID。各种帧的用途如下表所示:近期打算写5篇文章,分别详细介绍这5种类
在ISO 11898-2和ISO 11898-3中分别规定了两种CAN总线结构(在BOSCH CAN2.0规范中,并没有关于总线拓扑结构的说明):高速CAN总线和低速CAN总线,区别表如下所示:本篇博文将详细介绍两者的特性和区别。高速CAN总线ISO 11898-2中定义了通信速率为125Kbps~
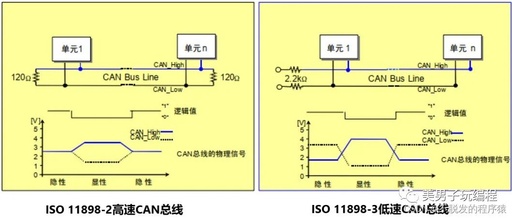
CAN总线终端电阻,一般来说都是120欧姆,实际上在设计的时候,也是两个60欧姆的电阻串起来,而总线上一般有两个120Ω的节点,基本上稍微知道点CAN总线的人都知道这个道理。但是作为学渣的我,知道这个是在各种标准以及各种数据手册和应用笔记里

盘点主流智能汽车电子架构
本文对几家主流智能汽车的架构设计概念进行了技术分析,并对几种智能汽车的架构设计概念进行了评价。1. 智能汽车电子架构研究现状传统分布式汽车电子电气架构的设计 思想为硬件定义规格,硬件架构采用CAN总线网络和分布式功能单元,单功能单控制器,软硬件不能解耦,专用传感,专用控制器,专用算法。传统汽车电子电


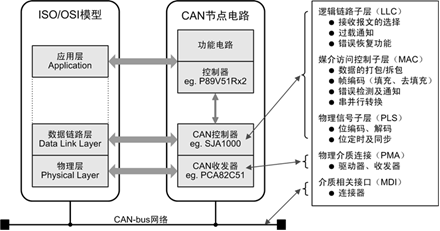
嵌入式的工程师一般都知道CAN总线广泛应用到汽车中,其实船舰电子设备通信也广泛使用CAN,随着国家对海防的越来越重视,对CAN的需求也会越来越大。 概述 CAN(Controller Area Network)即控制器局域网,是一种能够实现分布式实时控制的串行通信网络。想到CAN就要想到德国的B
CAN总线是一种常见的串行通信协议,被设计用在高噪声环境下提供可靠的通信,被广泛应用在汽车、工业自动化和其他领域,为保证能在条件恶劣的工业环境下工作,CAN总线都会具备完整的错误检测能力及校验方法,下面来看看CAN总线有哪些校验法?1、简单
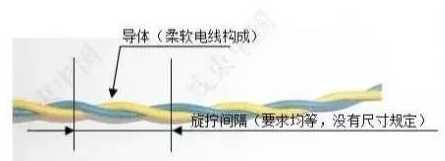
CAN(Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。在CAN总线应用中,一般建议使用屏蔽双绞线进行组网、布线,本文将详细讲
通过一个简单2层板的原理分析,PCB布局布线及生产资料输出的全程实战教学,旨在让Altium Designer初学者掌握PCB画板的最基本操作技巧及设计思路。主要包含的模块有:MCU、数码管显示、SPI存储、I2C存储、CAN总线电路、485电路、232电路、ISP接口、TFT接口、蜂鸣器、LED电路、JTAG接口、复位电路等、电源供电、NRF24L01等。