扫码关注
扫码关注

















- 全部
- 默认排序
作为一种在工业控制和汽车电子领域的通信协议,CAN总线具有高效且可靠、实时性等特点被广泛应用,其中CRC校验是CAN总线通信中常用的错误检测机制,下面来看看CAN通信中的CRC原理及校验方法,希望对小伙伴们有所帮助。1、CRC校验原理CRC
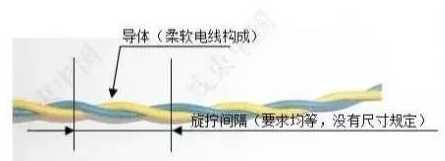
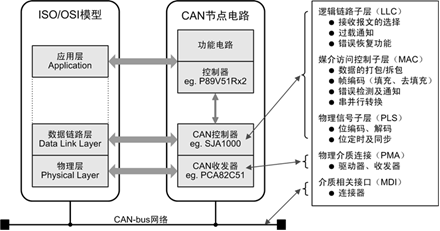
CAN(Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。在CAN总线应用中,一般建议使用屏蔽双绞线进行组网、布线,本文将详细讲
CAN通信是通过以下5种类型的帧进行的:数据帧 遥控帧 错误帧 过载帧 帧间隔另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的标识符(Identifier: 以下简称 ID), 扩展格式有 29 个位的 ID。各种帧的用途如下表所示:近期打算写5篇文章,分别详细介绍这5种类
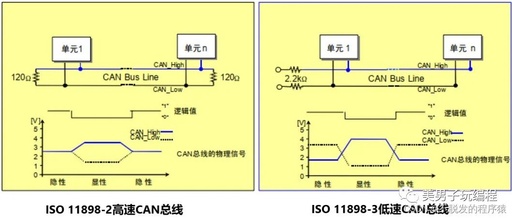
在ISO 11898-2和ISO 11898-3中分别规定了两种CAN总线结构(在BOSCH CAN2.0规范中,并没有关于总线拓扑结构的说明):高速CAN总线和低速CAN总线,区别表如下所示:本篇博文将详细介绍两者的特性和区别。高速CAN总线ISO 11898-2中定义了通信速率为125Kbps~

大家有听说过LIN总线吗,在汽车总线设计中经常会看见LIN总线,也许你可能要问“不是已经有CAN总线了,哪来的LIN总线?”其实理由很简单,CAN总线太贵了,若是整个汽车都选择CAN总线,成本昂贵,所以厂商们开始发明了LIN总线,那么它是什

嵌入式的工程师一般都知道CAN总线广泛应用到汽车中,其实船舰电子设备通信也广泛使用CAN,随着国家对海防的越来越重视,对CAN的需求也会越来越大。 概述 CAN(Controller Area Network)即控制器局域网,是一种能够实现分布式实时控制的串行通信网络。想到CAN就要想到德国的B
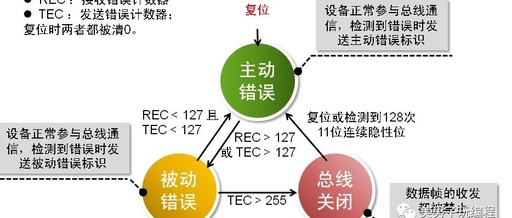
1、什么是busoff?BUSOFF,从字面意思可以看出,表示总线的关闭,此时ECU从总线脱离,既不能接收总线的报文,也不能向总线发送报文。 2、BUSOFF是如何产生的?CAN总线上存在多种错误状态,包括:位错误(Bit Check Error)、位填充错误(Bit Stuff Error)、C
随着汽车电子和工业自动化领域的发展,控制器局域网(CAN)总线技术得到了广泛应用,然而在复杂的电磁环境中,电磁兼容性(EMC)问题愈发严重,本文将从多种方面来详细分析基于CAN总线的EMC特点,一起来看看吧!CAN总线是一种串行通信协议,被

全站最新内容推荐