扫码关注
扫码关注

















找到 “声波” 相关内容 条
- 全部
- 默认排序
雷达,被称为电动汽车自动驾驶的“眼睛”。目前主流的“眼睛”有四类,分别是毫米波雷达、激光雷达、超声波雷达、摄像头,它们有着不同的功能以及运用不同的工作原理。本文主要介绍毫米波雷达、激光雷达、超声波雷达这三种技术都应用在哪些场景,又怎么进行区
729 0 0

文章
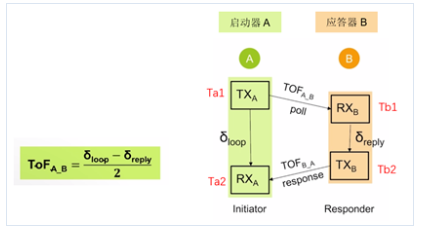
UWB测距定位原理介绍
在这个万物互联的时代,定位已经成了信息社会运转的核心要素,UWB以其独特的优势从 Wi-Fi、蓝牙、红外线、超宽带、RFID、ZigBee和超声波等众多的无线定位技术中脱颖而出,今天我们很有必要说说UWB测距的基本原理。1测距原理:ToF(
1181 0 0
如何实现一个低阻抗的电源分配系统-与传输线特性一样,电源噪声波动在传到电源地平面的边缘时,同样将发生反射的现象,反射回来的噪声可能会在平面内部发生谐振。
1044 0 0

如何实现一个低阻抗的电源分配系统-与传输线特性一样,电源噪声波动在传到电源地平面的边缘时,同样将发生反射的现象,反射回来的噪声可能会在平面内部发生谐振。
1092 0 0
全站最新内容推荐