扫码关注
扫码关注

















找到 “九轴IMU” 相关内容 条
- 全部
- 默认排序
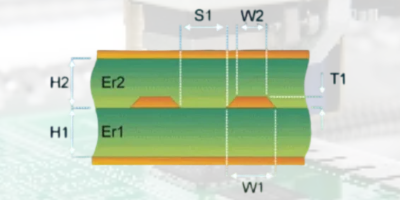
九轴IMU通常由以下三部分组成:三轴加速度计:测量线性加速度,可用于确定重力方向和线性运动三轴陀螺仪:测量角速度,用于检测旋转运动三轴磁力计:测量地磁场,提供绝对方向参考这些传感器的互补特性使得传感器融合成为必要。融合算法通过结合各传感器数据,克服单一传感器的局限性,提供更准确的姿态估计。由于各传感
712 0 0

九轴IMU通常由以下三部分组成:三轴加速度计:测量线性加速度,可用于确定重力方向和线性运动三轴陀螺仪:测量角速度,用于检测旋转运动三轴磁力计:测量地磁场,提供绝对方向参考这些传感器的互补特性使得传感器融合成为必要。融合算法通过结合各传感器数据,克服单一传感器的局限性,提供更准确的姿态估计。由于各传感









版权所有© 2022 湖南凡亿智邦电子科技有限公司湘ICP备18024493号-1