扫码关注
扫码关注


















MEMS陀螺仪能感知旋转,靠的是内部微结构的“运动魔法”。想搞懂它的运动控制,得先抓住这几个核心基础。
一、科里奥利效应是核心原理
MEMS陀螺仪靠科里奥利力(Coriolis Force)工作。当陀螺仪的驱动质量块沿一个方向振动时,如果外部有旋转,质量块会因科里奥利效应产生垂直于驱动方向的侧向运动。控制这个侧向运动,就能测出旋转角速度。
二、驱动模式控制是第一步
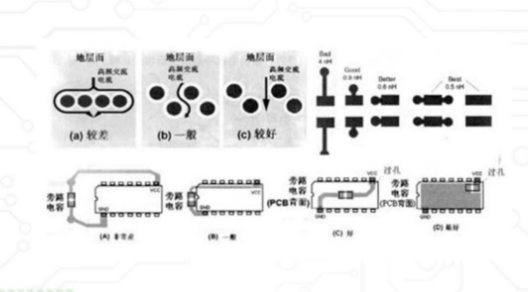
让质量块“动起来”:通过静电、压电或电磁方式给驱动质量块施加交变力,使其按固定频率振动(通常在kHz到MHz量级)。
稳住振动幅度:用闭环控制(如PID)保持驱动振幅稳定,避免因温度、电压变化导致振动减弱或增强,影响测量精度。
三、检测模式控制是关键
捕捉侧向运动:当陀螺仪旋转时,驱动质量块的侧向运动会被检测电极感知,产生与角速度成正比的电容或电压变化。
抑制噪声干扰:检测信号通常很微弱(纳伏级),需用低噪声放大器放大,并通过滤波(如带通滤波)去掉驱动频率的干扰和其他噪声。
四、闭环反馈控制提精度
力反馈机制:在检测模式中,通过施加反向力(力反馈)抵消科里奥利效应引起的侧向运动,使质量块保持“静态”检测状态。这种闭环控制能提高线性度和带宽。
温度补偿:MEMS材料对温度敏感,需通过算法或硬件补偿温度变化引起的零偏和灵敏度漂移。
五、接口电路与信号处理
模数转换(ADC):将检测到的模拟信号转为数字信号,方便后续处理。
数字信号处理(DSP):用算法(如卡尔曼滤波)进一步降噪、校准,输出准确的角速度数据。
本文凡亿教育原创文章,转载请注明来源!