扫码关注
扫码关注


















在嵌入式开发中,"上RTOS提升效率"的论调常被提及,但实际项目中却常出现"系统更卡"的反直觉现象。本文从技术本质出发,用3分钟时间理清RTOS与裸机的核心差异,给出直接决策建议。
一、RTOS效率悖论解析
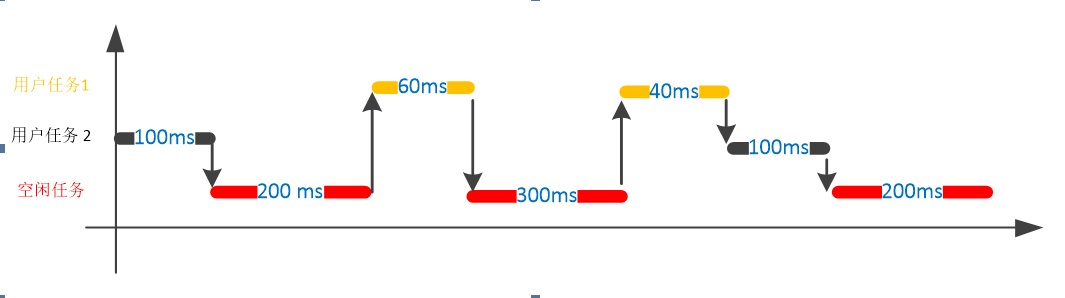
1. 任务调度开销
上下文切换成本:FreeRTOS任务切换需84个CPU周期,μC/OS-III达150周期。
中断延迟:RTOS关中断时间直接影响实时性,裸机中断直接执行。
内存消耗:RTOS内核占5-10KB ROM,任务栈空间需额外分配。
2. 裸机性能优势场景
单任务系统:如简单传感器采集,裸机中断响应时间可压降至微秒级。
资源极限场景:STM32F0系列(8KB RAM)运行裸机代码仅需1.2KB RAM。
硬实时需求:电机控制、PWM调制等对时序敏感场景。
二、RTOS适用场景决策树
1. 必须用RTOS的场景
多任务并行:同时处理通信、显示、控制(如无人机飞控)。
优先级管理:医疗设备需保证生命支持任务优先执行。
复杂交互:工业HMI设备需协调触摸屏、网络、数据存储。
可维护性要求:团队开发需模块化隔离(如汽车电子ECU开发)。
2. 慎用RTOS的场景
低端MCU:8位芯片(如AVR)运行RTOS可能卡顿。
超低功耗:裸机可快速进入休眠模式(如物联网传感器节点)。
简单逻辑:LED流水灯、单传感器数据采集等。
极端成本敏感:每增加1KB RAM成本需重新评估。
三、折中方案:轻量级调度器
1. 协程方案
实现原理:通过状态机模拟多任务(如Protothreads库)。
优势:零内存分配,适合STM8等资源受限场景。
局限:无真正并行,复杂任务易阻塞。
2. 事件驱动架构
核心机制:中断触发任务处理(如MQTT消息解析)。
案例:智能门锁通过事件驱动实现低功耗运行。
工具链:结合状态机生成器(如YAKINDU)。
四、关键决策指标

本文凡亿教育原创文章,转载请注明来源!