扫码关注
扫码关注


















手机Camera
一、工作原理
关于Camera,景物通过镜头生成光学图像投射到图像传感器表面上,然后光信号转换为模拟的电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片中加工处理,再通过IO接口传输到CPU中处理,最终通过LCD显示成像。
二、分类
目前的手机摄像头主要为以下几类
1.长焦
焦距在60mm以上的摄像镜头。其具备类似望远镜的功能,3X及以上的模组都属于这个范围。手机中的主摄往往采用长焦模组。
2.景深
目前大部分手机都不会上的摄像头,即使上了,也大多数为了凑数。实不相瞒,上一次接触景深,还属2020年小白大学刚毕业入职公司参与的第一个项目。
手机中采用的景深摄像头多为TOF摄像头。TOF-Time-of-Flight,即飞行时间。TOF镜头会发出红外线并计算投射到不同点位的红外线反射回来的时间,根据时间差,可以得知不同点位到手机镜头的距离,进而识别出被拍摄画面不同平面的深度。

3.微距
当手机拍摄近距离物体时,我们发现往往会很模糊。这个时候,如果要想拍的清晰,拍的细微就要用到微距,其拍摄距离往往在2-10cm之内。比如网络上的一些近景的花卉,昆虫均采用微距拍摄。
4.广角
顾名思义拥有广阔的视角。同一位置下可以获得更宽广的画面。具有视野宽阔,景深长,镜头焦距短的特点。

普通镜头

打开广角
三、硬件电路
聊完了摄像头的分类,来到文章的重点地方。如下为手机上一颗主摄的硬件电路设计。分为电源和普通信号线。
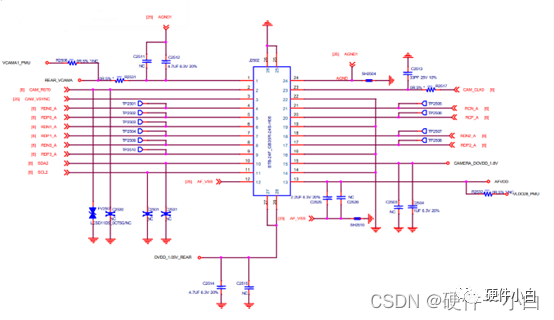
硬件电源
Camera一般离不开这四路电:AVDD、DVDD、IOVDD、AFVDD
其中
1.AVDD
Sensor模拟电源。主要给内部的感光区以及ADC供电,属于敏感电源。在Camera预览出现水波纹或者黑暗条件拍摄噪点大问题一般均是AVDD电源不干净所导致。多个不同时工作的Camera,可共用一个AVDD。前摄和后主摄的AVDD不可共用。虽部分摄像头可共用,但也必须做LDO预留设计,预留的LDO优先作为大像素的备份。每个Camera的AVDD输入必须预留RC滤波网络用于debug需要。
2.IOVDD
IO接口电源。主要给内部I2C和MIPI供电。同时IO的电通常与对应Camera的I2C的上拉源共用一组电。功耗属于最低,属于uA级别。对噪声不敏感,影响较低。
3.AFVDD
对焦马达电源。在手机主摄中,往往存在着AFVDD这路电。主要作用是为了实现对焦。手机摄像头的音圈马达(VCM)需要Driver IC配合完成对焦。其两个PIN都接在Driver IC上,在一个永久磁场内,通过Driver IC改变马达内线圈的直流大小来控制弹簧片的拉伸位置,从而带动上下移动。
尝试将后置摄像头打开或者关闭,可以听到音圈马达因移动产生的撞击的声音。同时在关闭摄像头时,手机离拍摄物越近,关闭时响声越明显,与拍摄物越远响声越是听不到。下面小白来给大家解释一波。
开启有撞击声
开机或者重启第一次打开摄像头,马达驱动初始位置为马达有效行程的最底端。如果行程较大,很容易撞上底座。如果想要优化这类问题,可选择修改初始化位置,将其改到行程中间。

修改前
修改后

退出Camera撞击声
Camera退出后,马达掉电,线圈中不存在电流,弹簧失去洛伦兹力的牵引,在弹力作用下恢复原状,弹簧的位置靠近底座,恢复原位置回弹时会撞到底座产生撞击声。马达退出时距离底座越远声音越大,即对焦物体越近,退出时声音越大。这也就解释了前面的现象。
AFVDD通常由LDO供电,LDO的选择≥15dB@1KHz~1MHz。
4.DVDD
DVDD:给与Camera内部芯片的数字信号供电,电压一般在0.95V-1.2V。主要给内部的ISP等模块供电,功耗最高。以50M摄像头来看,其DVDD耗流的Typ值为236.3mA,MAX值未知。由于手机主板的连接器座子的Pin通流能力为300mA,所以在设计中,这路电我们往往选择两个Pin以保证设计的安全性。
其与其他电相同,均采用LDO供电,要求PSRR≥20dB@1KHz~1MH。因电流大,所以要求输入与输出的压差尽可能的小。因LDO本身属于线性器件,输入电流与输出电流基本一致,压差大,使得LDO的使用效率低,能量以热能散失,影响到整机的温升。同时因LDO前级的输入为系统BUCK的输出,BUCK本身由DCDC电路VBAT过来。在LDO的电流一致下,DCDC转换效率相同,LDO的输入电压越高,DCDC电路其从VBAT上消耗的电流也就越大,从而影响到整机功耗。(DCDC:Iin * Vbat 80%=IoutUout ,Iin=Iout*Uout/Vbat/0.8 Vbat Iout固定 Uout越大,Iin也就越大)
硬件信号
1.I2C
Camera与BB芯片的通信方式属于I2C。速率一般在400K。可同时工作的Camera,例如前后主摄不可共用一组I2C,以免I2C带宽不足,降低Camera对Host的响应速度、增加Camera的响应延迟。
2.MCLK
除了几个重要的电源外,还存在时钟信号,其由BB芯片提供,频率24M。是CCM sensor的时钟源,MCLK由sensor处理后变成传输数据所需要的PCLK,PCLK指pixel采样的时钟。其通路上往往串一颗磁珠,以解射频desense问题。
3.VSYNC
场同步信号。双摄下多个摄像头需要同时曝光出数据。所以各Camera的VSYNC接到一起用于同步。同时工作的Camere要用0R电阻隔开以备调试。
MIPI:高速信号,内容太多,一两下讲不清。
PCB设计
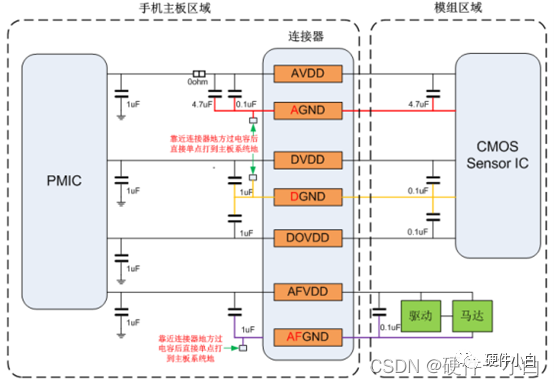
根据图示放置电容,并靠近对应的Pin摆放(PMU输出电容靠近PMU,Camera去耦电容靠近连接器摆放)。
AVDD:RC滤波组合靠近连接器放置;0.1UF靠近连接器放置,4.7uF次之。电容的地与Camera模组上的模拟地AGND相连一起并在靠近连接器处通过Via下到主地。如果预留LDO,同样要求靠近连接器摆放。AVDD做好保护,走线立体包地。尽量少打孔换层,禁止与电流,RF以及时钟信号并行或者相邻。
DVDD:电容摆放靠近连接器,因电流大,线宽要求满足对应的电流值即可。
IOVDD:电容摆放靠近连接器,电流小,基本线宽即可。
AFVDD:同AVDD。AFGND的Pin直接与对应的去耦电容负极连接并且靠近座子下主地。不可与其他层的GND网络存在物理连接。
三路电的线宽均以1A 1mm线宽的方式进行设计。
MIPI:通常串共模电感,但目前的项目往往选择省略。用于MIPI信号测试的测试点需摆放在MIPI路径上。保持内层走线,除BB以及连接器端外,避免表层走线。整个路径打孔不超过4个。换层后走线依旧保持完整的参考地平面,每组MIPI Data与MIPI CLK单独包地处理。如果无法做到单独包地处理,组与组需保持3W原则。差分阻抗控制在100ohm±10%.差分内P和N等长控制在15mil,组间控制在40mil.
MCLK:属于高速信号。做好立体包地。测量时使用弹簧针测试,确保测试出的波形不会失真。MCLK信号如果不做好保护导致的波形异常,同样也会在效果上显示存在严重的缺陷。
连接器下方的表层和次表层保持完整的GND,不能走线。
Camera场景功耗优化
小编曾经搞过一段时间的功耗,也被Camera场景下的功耗优化折磨过一段时间。
降低帧率:在一些特殊场景,对camera的本身要求不是很高时,可以选择降低帧率的方式来降低功耗。
关闭算法:同帧率一样,在一些对camera本身要求不是很高的场景下,可以关闭算法,以降低功耗。
降低MIPI速率。
人脸检测周期调整。
四、总结
其实从手机硬件设计的角度来看,Camera的东西并不是很多。往往出问题最多的无非就是Camere场景功耗 mipi信号测试以及画质显著的缺陷的问题。硬件设计方面,PCB的设计起到了很重要的作用。好的设计往往可以避免很多问题。