扫码关注
扫码关注

















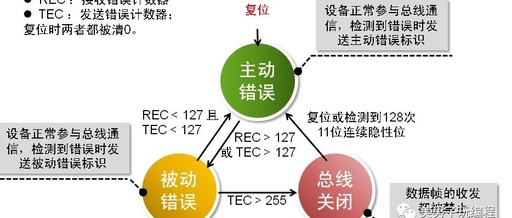
CAN通信是通过以下5种类型的帧进行的:数据帧 遥控帧 错误帧 过载帧 帧间隔另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的标识符(Identifier: 以下简称 ID), 扩展格式有 29 个位的 ID。各种帧的用途如下表所示:近期打算写5篇文章,分别详细介绍这5种类
3019 0 0

多领域、有深度的开发者交流平台
CAN通信是通过以下5种类型的帧进行的:数据帧 遥控帧 错误帧 过载帧 帧间隔另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有 11 个位的标识符(Identifier: 以下简称 ID), 扩展格式有 29 个位的 ID。各种帧的用途如下表所示:近期打算写5篇文章,分别详细介绍这5种类
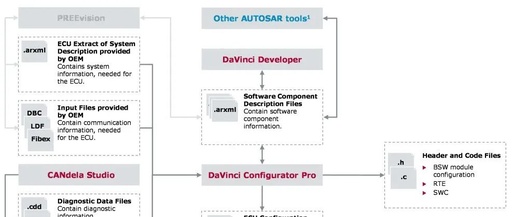
AUTOSAR方法论是指AUTOSAR为汽车电子软件系统开发过程定义的一套通用技术方法。该方法论描述了从系统层配置到ECU可执行代码产生过程的设计步骤,如下图所示:AUTOSAR设计和开发流程分为三个阶段:系统配置阶段、ECU设计与配置阶段、代码生成阶段。系统配置阶段:是系统设计者或架构师的任务。包
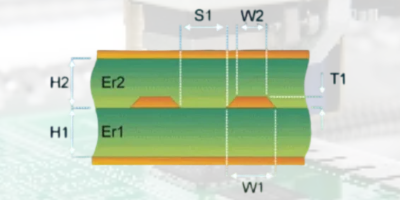
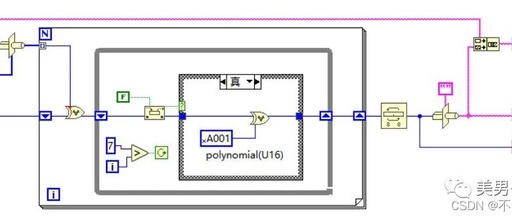
CRC(循环冗余校验),是一种根据网络数据包或计算机文件等数据产生简短固定位数校验码的一种信道编码技术,主要用来检测或校验数据传输或者保存后可能出现的错误。它是利用除法及余数的原理来作错误侦测的。关于CRC校验的实验原理这里不再赘述,百度上有很多的解析,本篇博文主要讲解在LabVIEW环境中如何实现
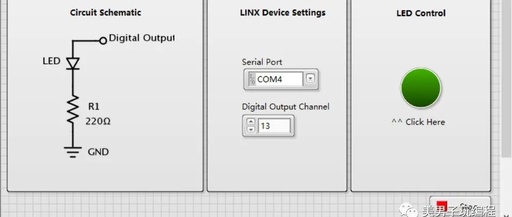
在LabVIEW和单片机(Arduino)系列专栏中使用LabVIEW Interface for Arduino接口工具包实现和Arduino联控。本篇博文将拓展讲解另一款新的接口工具包实现对Arduino的控制,它就是LabVIEW LINX。LabVIEW LINX Toolkit可支持驱动R
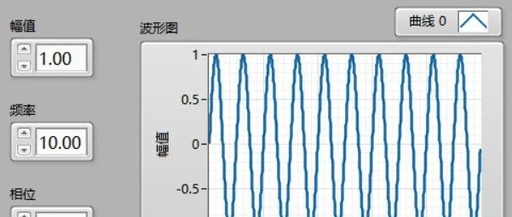
LabVIEW实在强大方便,今天为各位分享一个小技巧:如何制作一款模拟波形效果小软件。这里依托于LabVIEW内置的波形生成VI,本篇博文仅仅仅介绍基本函数发生器VI,仅仅是一个抛砖引玉,感兴趣的朋友可以多多尝试。仅仅使用一个控件实现Sine Wave(默认)、Triangle Wave、Squar
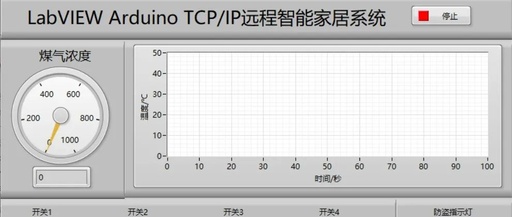
1、项目概述智能家居是以家为平台,兼备建筑化于一体的高效、舒适、安全、便利的家居环境。它是采用家庭控制总线、互联网、通信、人工智能、单片机、传感器等一系列高新技术将家居设备控制,安防管理生活信息及资讯管理,家居互联网通信等与我们日常生活息息相关的常用生活元素全面并缜密地结合在一起,能够高度地提升我们
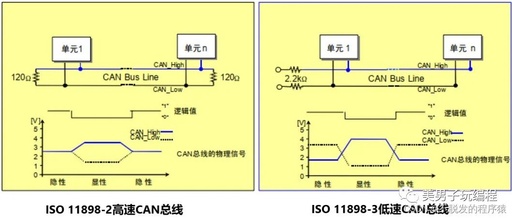
在ISO 11898-2和ISO 11898-3中分别规定了两种CAN总线结构(在BOSCH CAN2.0规范中,并没有关于总线拓扑结构的说明):高速CAN总线和低速CAN总线,区别表如下所示:本篇博文将详细介绍两者的特性和区别。高速CAN总线ISO 11898-2中定义了通信速率为125Kbps~
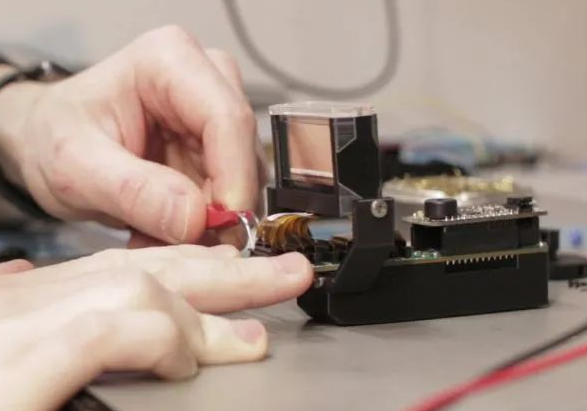
MAKER: seanhodgins/译:趣无尽我们日常所看到的屏幕,无非是高清平面显示器、LED 平面显示屏之类,这些屏幕无处不在,充斥了这个世界,也让人觉得稀松平常、缺少一些未来科技的感觉。一直希望能有一种能不依赖高速转动(比如某些可以显示 3D 画面的「风扇」显示屏)就可以实现景深显示效果的单
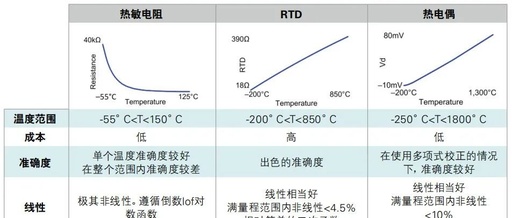
热敏电阻热敏电阻是一种传感器电阻,其电阻值随着温度的变化而改变。按照温度系数不同分为正温度系数热敏电阻(PTC thermistor,即 Positive Temperature Coefficient thermistor)和负温度系数热敏电阻(NTC thermistor,即 Negative
本篇博文是Python+OpenCV实现AI人脸识别身份认证系统的收官之作,在人脸识别原理到数据采集、存储和训练识别模型基础上,实现人脸识别,废话少说,上效果图:1案例引入 在AI人脸识别身份认证系统(3)——训练人脸识别模型中主要讲述神经网络模型的训练过程,使用OpenCV模块中的LBPH(LOC










版权所有© 2022 湖南凡亿智邦电子科技有限公司湘ICP备18024493号-1